5月10-12日,第十二届北京市大学生机械创新设计大赛在北京工业大学举行。本届比赛的主自然和谐迈向仿生新高度”,北京地区共有27所高校的近1200名题是”机械创新推进农业现代化、学生参加,参赛规模为历届之最👩🏼🦰。经过激烈的角逐,尊龙凯时平台获得一等奖1项🤦♀️👩🏻🚀,二等奖2项。
以下是我院获奖名单:

以下是我院获奖项目介绍。
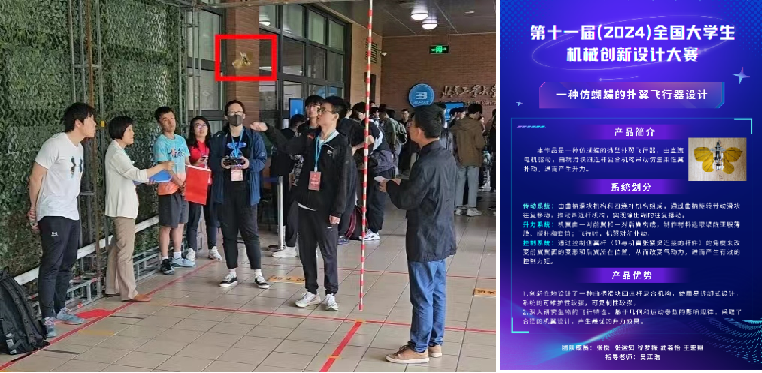
一种仿蝴蝶的扑翼飞行器设计
全部作者:张悦、张运知🧑🔧、武荟怡👦🏻、徐梦振、王宏翔
指导老师⟹:吴江浩
项目介绍🧍🏻♂️:
本作品是一种仿蝴蝶的微型扑翼飞行器,由直流电机驱动🙇🏼♀️,曲柄滑块四连杆复合机构带动仿生柔性翼扑动👍🏿,进而产生升力。传动系统由曲柄滑块机构和四连杆机构组成,通过曲柄旋转带动滑块往复移动🍷,推动四连杆机构📒,实现输出端的往复摆动🙎🏼♀️。升力系统中,机翼由一对前翼和一对后翼构成🚜,制作材料选取聚酰亚胺薄膜、碳杆和套筒;飞行时📅,机翼对称扑动💁🏻。控制系统部分,通过控制侧翼杆(即与机翼张紧梁连接的杆件)的角度来改变前翼翼面的变形和后翼所在位置,从而改变气动力🚯,进而产生有效的控制力矩🌽。本作品优势在于,创新性地设计了一种曲柄滑块四连杆复合机构,使用易拆卸式设计,系统的可维护性较强♎️,可复制性较强;深入研究生物的飞行特性,基于几何和运动参数的影响规律🚶,采取了合适的机翼设计,产生最优的升力效果。
仿生青蛙跳跃机器人
全部作者:莫嘉宇🪣🤞🏼、岳清扬、池奕达
指导老师🧝🏿:王岩、王卫林
项目介绍:
青蛙是两栖动物🍍,具有优异的跳跃能力🪿。仿生青蛙的研究通过借鉴生物学原理和生物系统的设计,旨在将青蛙的跳跃运动应用于机器中🫰,实现更高效🧔🏻♂️、稳定的跳跃运动👫。通过模拟青蛙的蓄力方式和跳跃过程😇,设计了仿生青蛙跳跃机器人。挂钩事先钩在蛙身框架上🎉🈴,电机丝杆旋转带动推块向下移动,压紧弹簧🏖。当推块接触到挂钩时,挂钩被推块顶开,失去与蛙身框架的接触,此时弹簧释放👱🏽♂️,带动青蛙跳跃✳️。

兴农机械-基于机器视觉识别的扫描式感知和梳理式采集一体化茄子自动采收机器人
全部作者🧑🏻🍳:古松岩、郭健一、蔡昕远🤡、甘甜
指导老师◻️:徐国艳😐、高峰
项目介绍🐶:
本项目旨在设计和研发一款基于机器视觉识别的茄子自动采收机器人。该机器人结合了扫描式感知技术和梳理式采摘技术,能够快速👮🏿♂️🎧、准确地识别成熟茄子并进行定位采摘。其底盘采用平衡摇臂设计,适应丘陵等多种地形,确保机器人在复杂地形中平稳运行🚸。该项目的创新点在于高效的扫描识别和柔性采摘技术🎚,能够显著提高采摘效率,减少人工成本,并降低采摘过程中对茄子和植株的损伤©️。这款机器人适用于大棚和小型农业生产环境,通过全流程自动化操作🧑🧒🧒,提高了生产效率👰🏽♂️,促进了农业现代化发展🩵。项目不仅解决了农业劳动力短缺问题🌨,还可以推动了精准农业的发展🍂,为农业生产方式的转型升级提供了有力支持。
据悉,全国大学生机械创新设计大赛是由教育部高等教育司发文组建大赛组委会的全国大学生竞赛项目📥,是教育部、财政部通过“质量工程”持续三次资助的全国大学生竞赛项目之一。自2002年以来,已成功举办过十届🕵🏻♂️🎫,大赛影响持续提升,规模持续扩大。大赛在培养大学生的创新设计能力👵🏿、综合设计能力和团队协作精神等方面发挥着重要的平台作用💆♂️👃,扩展了工科大学生的素质教育空间。